





机器人完成一次巡检后自动回到充电桩进行充电
机器人自动充电采用防爆无线充电技术 ,杜绝触点,保证运行安全;
机器人正常运行续航时间为3至6个小时,充电时间为0.5至3小时。
充电时受电端和充电点位置自动校准,电池充电过程完全自动化,无需人
工干预。
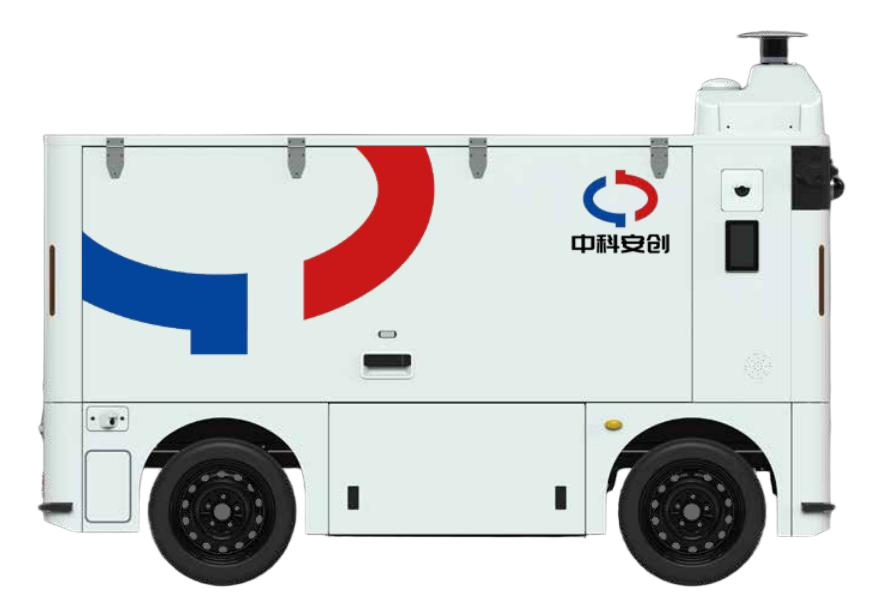
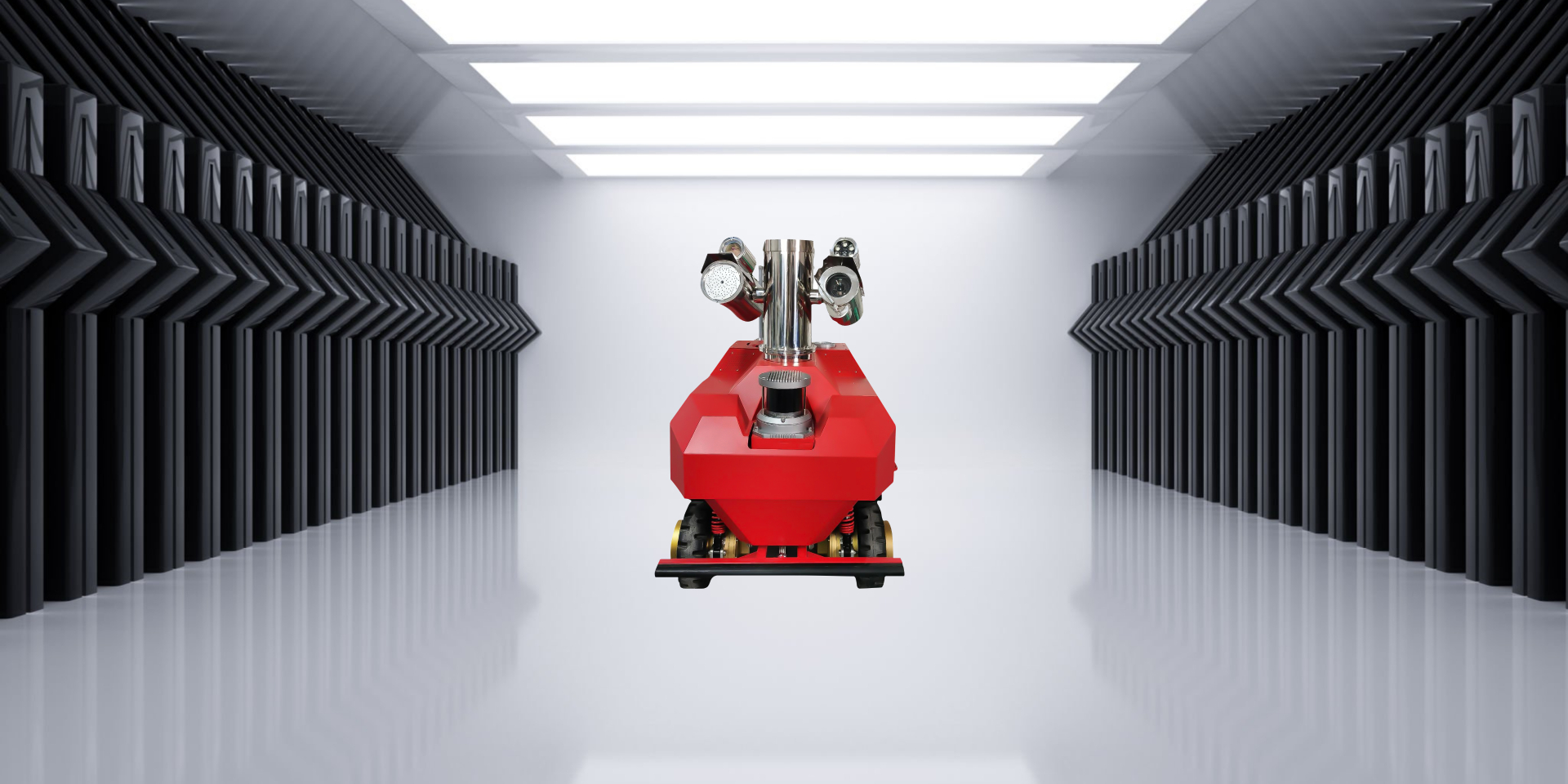
外形尺寸:占地5.8㎡,高2.5m
防爆等级:不低于Ex d IIB T4 Gb
抗风能力:不低于8级风
供电电压:220VAC±10%,50Hz
通信方式:支持4G或5G或WiFI或防爆AP
生产装置区
设备温度、状态检测、表计识别、跑冒滴漏检测、油杯液位识别等
机器人完成部署后,依据巡检任务,完成自主巡检功能,可实现从充电
到巡检全程无人干预,自主作业,发现危险及时报警
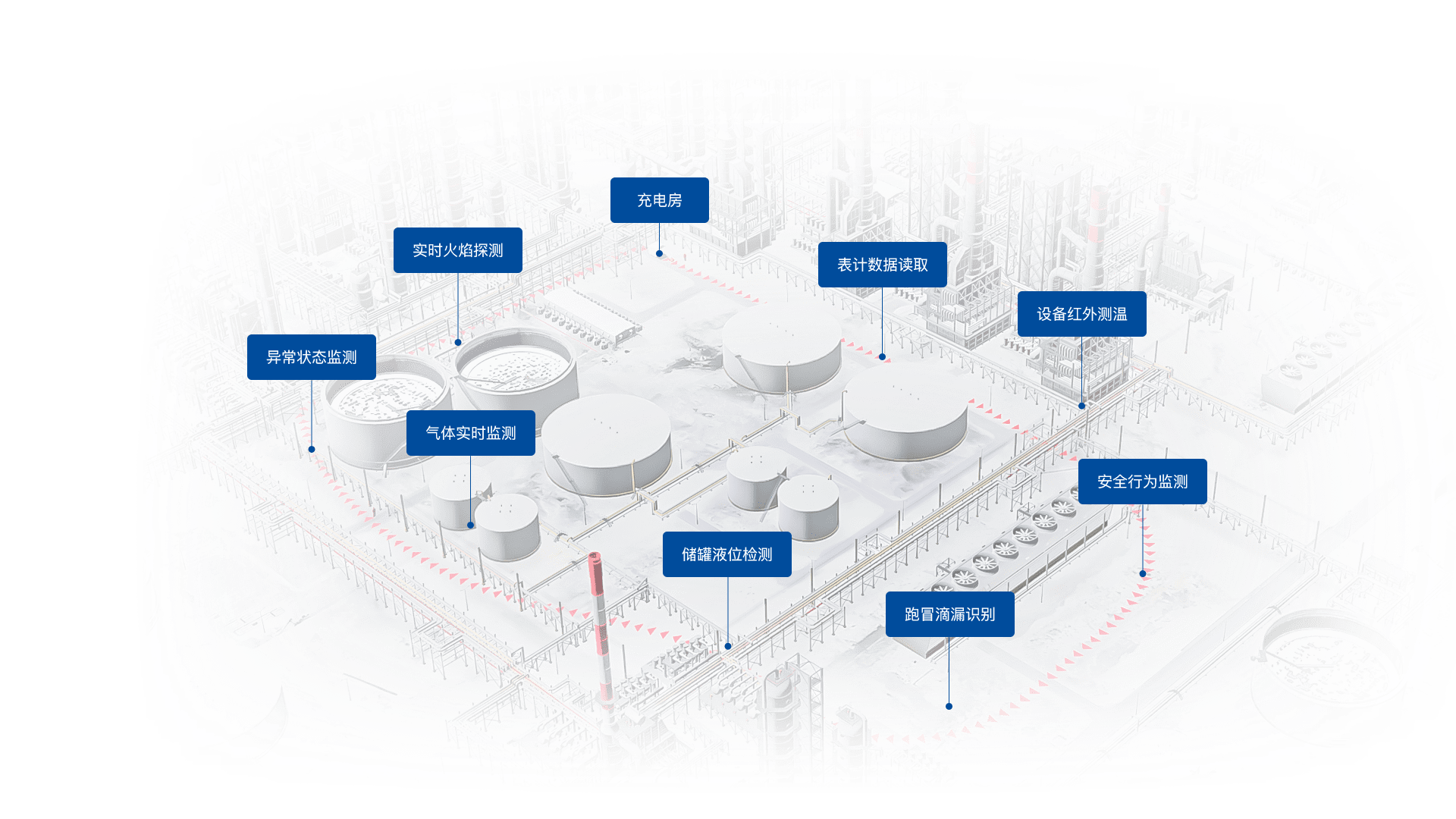



应用场景:设备装置区易泄漏装置检测
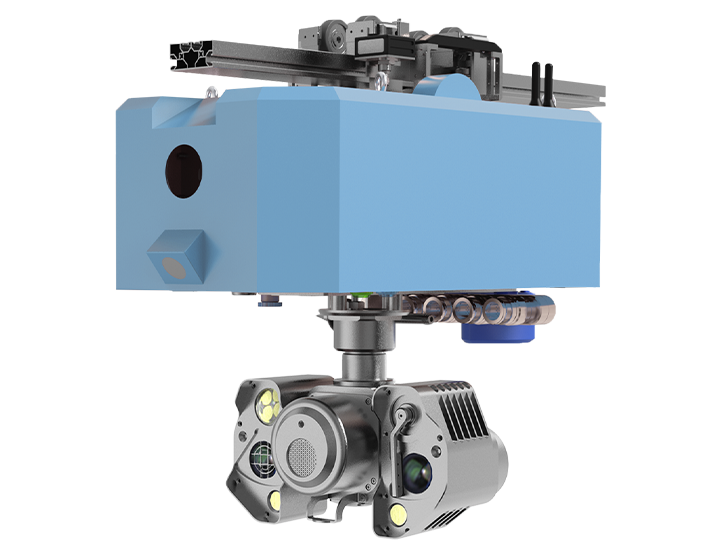
机器人通过AI视觉识别技术等检测手段,对工作设备进行跑冒滴漏检测。系统搭载高精度云台+高清摄像机精准定位泄漏点,对焦拍照发送至后端平台,平台上显示泄漏位置的坐标并预警,实现“跑、冒、滴、漏”检测。
应用场景:设备装置区易泄漏装置检测
机器人通过AI视觉识别技术等检测手段,对工作设备进行跑冒滴漏检测。系统搭载高精度云台+高清摄像机精准定位泄漏点,对焦拍照发送至后端平台,平台上显示泄漏位置的坐标并预警,实现“跑、冒、滴、漏”检测。
应用场景:设备装置区易泄漏装置检测
机器人通过AI视觉识别技术等检测手段,对工作设备进行跑冒滴漏检测。系统搭载高精度云台+高清摄像机精准定位泄漏点,对焦拍照发送至后端平台,平台上显示泄漏位置的坐标并预警,实现“跑、冒、滴、漏”检测。
应用场景:设备装置区易泄漏装置检测
机器人通过AI视觉识别技术等检测手段,对工作设备进行跑冒滴漏检测。系统搭载高精度云台+高清摄像机精准定位泄漏点,对焦拍照发送至后端平台,平台上显示泄漏位置的坐标并预警,实现“跑、冒、滴、漏”检测。
应用场景:设备装置区易泄漏装置检测
机器人通过AI视觉识别技术等检测手段,对工作设备进行跑冒滴漏检测。系统搭载高精度云台+高清摄像机精准定位泄漏点,对焦拍照发送至后端平台,平台上显示泄漏位置的坐标并预警,实现“跑、冒、滴、漏”检测。

机器人完成一次巡检后自动回到充电桩进行充电
机器人自动充电采用防爆无线充电技术 ,杜绝触点,保证运行安全;
机器人正常运行续航时间为3至6个小时,充电时间为0.5至3小时。
充电时受电端和充电点位置自动校准,电池充电过程完全自动化,无需人
工干预。
外形尺寸:占地5.8㎡,高2.5m
防爆等级:不低于Ex d IIB T4 Gb
抗风能力:不低于8级风
供电电压:220VAC±10%,50Hz
通信方式:支持4G或5G或WiFI或防爆AP




拍照

潜在风险

法律依据

整改建议
图片展示了一名工人在施工现场的脚手架上进行作业。工人穿着蓝色的工作服,佩戴白色的安全帽和护目镜,身上系有安全带,安全带的一端固定在脚手架上。工人正在用手操作脚手架上的某个部件,脚下踩在脚手架的横杆上。背景中可以看到更多的脚手架结构、一些施工设备和警示标志。地面上有一些泥土和建筑材料,显示出这是一个典型的建筑工地环境。
1.工人虽然佩戴了安全帽和护目镜,但需要进一步确认安全帽和护目镜是否符合标准,以及是否正确佩戴。 2.工人的安全带虽然系在了脚手架上,但需要检查安全带的固定点是否稳固可靠。 3.需要检查脚手架的搭建是否符合安全规范,是否有松动或损坏的部件。 4.地面上的泥土和建筑材料可能导致地面湿滑或有障碍物,增加了工人上下脚手架时摔倒的风险。需要保持地面的清洁和整洁,避免不必要的安全隐患。
根据场景解析,虽然存在多项安全隐患提示,但未发现直接指出构成立即威胁生命安全或可能导致重大事故的情况提示,但上述隐患若不及时整改,可能逐步恶化,需高度重视并迅速采取措施。
《中华人民共和国安全生产法》第四十二条《建筑施工高处作业安全技术规范》(JGJ80-2016)第5.1.1条
1.确认安全帽和护目镜是否符合标准并正确佩戴。
2.检查安全带的固定点是否稳固可靠。
3.检查脚手架的安全性。
4.保持地面清洁和整洁。